Accur8vision
Our volumetric detection system uses LiDAR technology to safeguard entire areas instead of only the perimeter.
Accur8vision

Accur8vision
Accur8vision combines LiDAR, 3D mapping, AI and other cutting-edge technologies to provide next-generation security
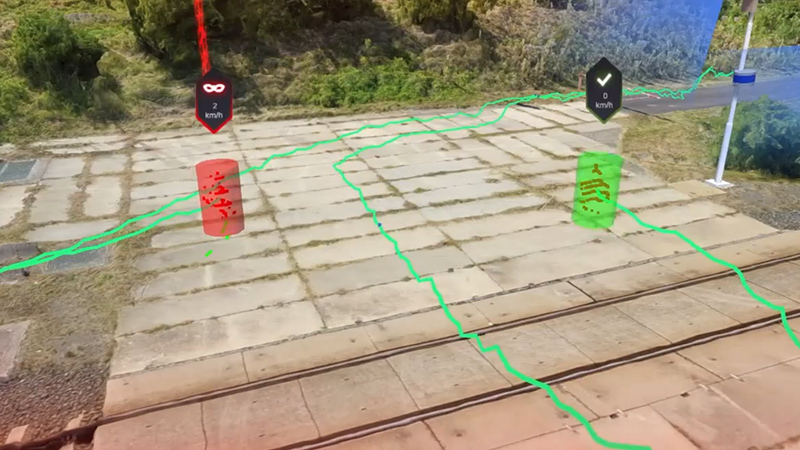
Accur8vision is an expanded perimetric security system. Unlike conventional systems that typically only guard perimeters, Accur8vision guards the entire area of a patrolled space. If the intruder enters the guarded area, the system is notified. The operator will have information based on the exact location, size, and speed of the intruder. Even the trajectory of his movements will be known.


Product Key Features
Discover key highlights and features of Accur8vision and how they can help you solve your application problems

Advanced view of alarm situations
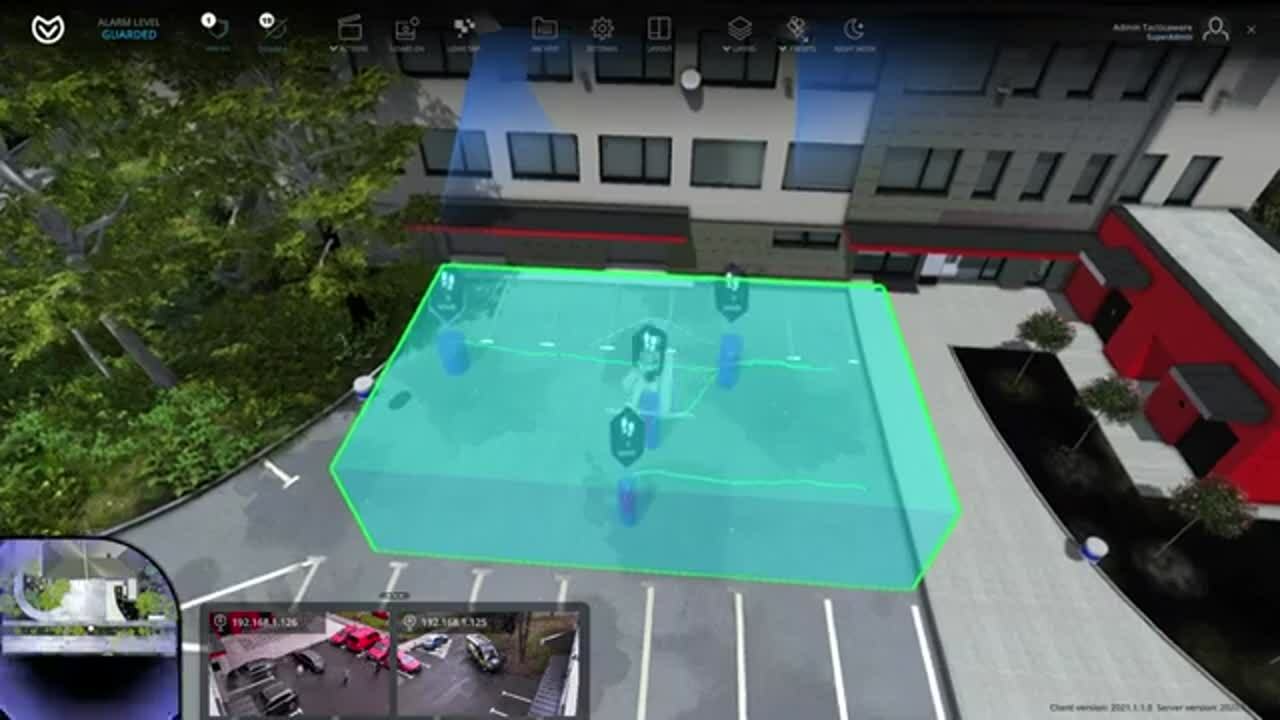
Accur8vision provides operators with crucial information during an alarm situation. When an intruder enters a guarded zone and violates the rules the operator set, the system raises an alarm. It records the intruder’s movement and visualises it for the operator on the display. The system can also be used with PTZ cameras which Accur8vision can automatically rotate to the active zone. Security staff can thus easily monitor the situation in real time.
Simple design of detection zones
To define the protected area, operators can easily set up three-dimensional detection zones. Because of LiDAR precision, these zones can be any shape. They can, for example, follow the actual shape of the boundary fences so that nothing outside the premises will trigger an alarm. Operators can also omit areas within a detection zone, for example vegetation. Different rules will define the system’s response in case of violation. Apart from alarm zones, the system has, for example, pre-alarm zones, entry zones, loitering zones and special check-point zones.

Utilises a digital twin of real world environment
To add clarity for the operator and make navigation of the system intuitive, Accur8vision makes sophisticated use of map visualisation. Operators can import the 3D model from other CAD systems or easily create the 3D digital twin themselves by using photogrammetry or capturing the premises with the Leica BLK2GO handheld laser scanner. They can then enhance the maps further with the advanced Map Modificator tool.

Planning tool with simple controls and virtual tests
With Accur8vision’s Virtual Planning Tool, operators can plan the security setup before implementation using a digital twin of the actual environment. You can drag & drop various types of LiDARs (Leica BLK247) and other security components (PTZ cameras, etc.) into the 3D map, move them around to find the best location and take virtual snapshots. You can then test the setup by walking a virtual intruder through the digital site. The system will visualise the laser beam hits to ensure every part of the areas is sufficiently guarded. The overall system settings are interactive and simple.

Utilises an intuitive 3D environment
Accur8vision utilises gaming elements and technology, including the Unity graphics engine, for its unique design. Being able to cast shadows and create other realistic graphic effects provides an information-rich environment for operators that enables intuitive interaction with the system and rapidly equips security staff with easy-to-absorb information during alarm events.
Friendly person feature
Accur8vision can distinguish between people with authorised access and unfamiliar intruders. Operators can mark people as friendly as they appear on the scene. Once approved, friendly persons’ bounding boxes appear green on the screen. They can now enter guarded zones without triggering an alarm. By coupling this functionality with an access control system, Accur8vision can automatically detect a friendly person after authorisation through an access card.
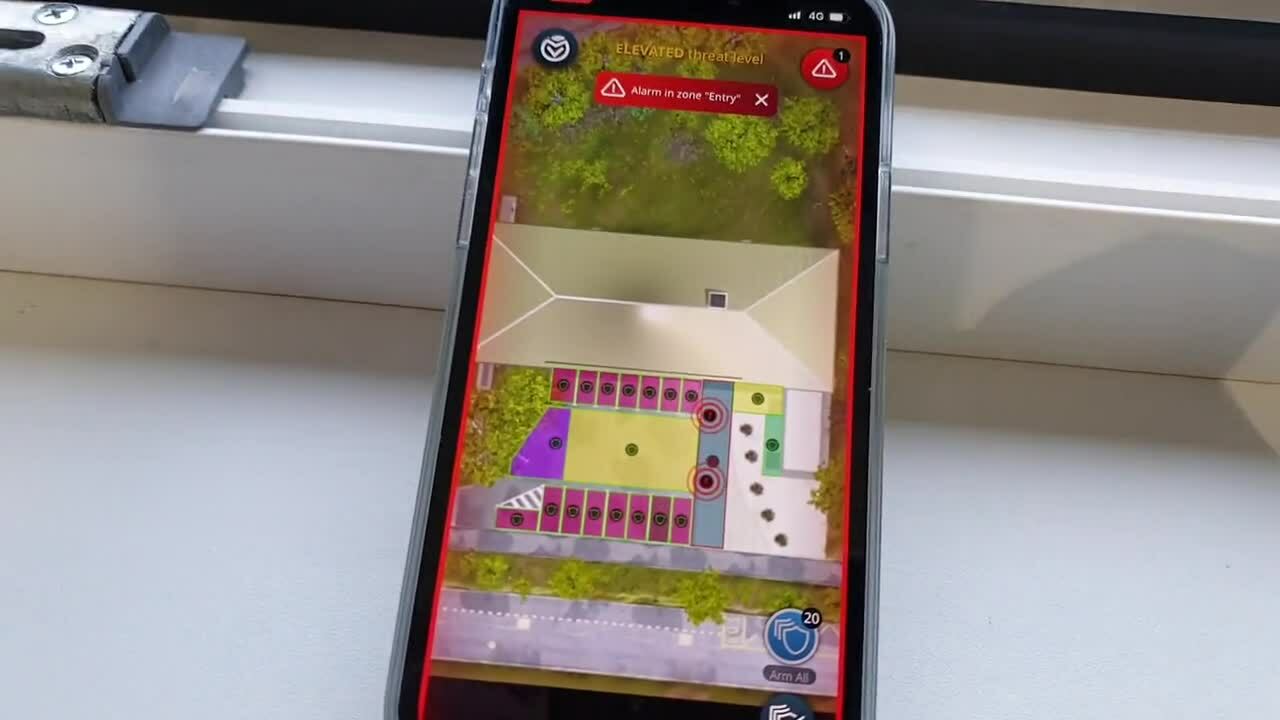
Remote access to security system
Remotely monitor the security of your infrastructure, assets or home. Our multi-platform system enables users to access the security system on desktop computers, laptops, tablets or mobile phones. Accur8vision also offers a light client, a web application that displays the map in 2D and displays the exact locations of the intruders using red dots viewed from above.